您好!欢迎访问思普泰克科技有限公司官方网站!

机器视觉系统的核心三大硬件
发布时间:2025-02-19点击数:
机器视觉系统的核心基础确实围绕相机、镜头、光源三大硬件组件展开,它们共同决定了系统的成像质量、检测精度和稳定性。以下是详细的分类解析与选型指南:

一、相机(Camera)
1. 核心功能
将光学信号转换为数字图像,是视觉系统的“眼睛”。
2. 关键参数

3. 选型建议
面阵相机:适合检测静止或低速物体(如端子外观缺陷)。
线阵相机:适合高速连续扫描(如引脚变形检测)。
3D相机(TOF/结构光):检测高度、深度(如组装到位程度)。
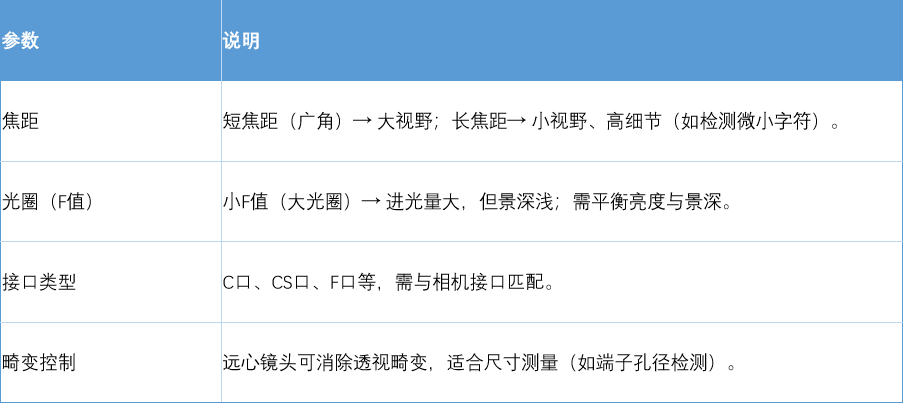
二、镜头(Lens)
核心功能控制光线路径,决定成像视野(FOV)、工作距离(WD)和分辨率。
关键参数
3. 选型公式
视野计算:
视野(FOV)=传感器尺寸÷放大倍率
例如:2/3"传感器(8.8mm×6.6mm)+ 0.5倍放大 → FOV=17.6mm×13.2mm。
工作距离(WD):根据机械安装空间选择定焦或变焦镜头。
三、光源(Lighting)
1. 核心功能
通过控制光线方向、波长、强度,突出目标特征,抑制干扰信息。
2. 光源类型与适用场景

3. 选型要点
波长选择:
红色(630nm):通用型,适合大多数场景。
蓝色(470nm):增强金属表面对比度。
红外(850nm):透射检测(如塑料内部气泡)。
照明角度:低角度照明可凸显纹理缺陷(如划痕)。
四、系统集成关键点
硬件协同:
相机分辨率需与镜头解析力匹配(避免“像素浪费”)。
光源亮度与相机曝光时间平衡,避免过曝或欠曝。
标定校准:
使用标定板(如棋盘格)校正镜头畸变和像素当量(μm/pixel)。
环境抗干扰:
遮光罩防止环境光干扰,恒流光源控制器确保亮度稳定。
五、实际案例配置示例
场景:检测端子引脚变形(精度±0.02mm,速度120件/分钟)。
相机:线阵相机(12K分辨率,行频40kHz)。
镜头:远心镜头(放大倍率0.3×,工作距离200mm)。
光源:蓝色背光源(470nm),提升引脚边缘对比度。
结果:系统精度达±0.015mm,漏检率<0.01%。
六、常见误区与避坑指南
盲目追求高像素:过高的分辨率会降低帧率,需平衡速度与精度。
忽略景深限制:大光圈导致景深不足,可能部分区域失焦。
光源波长不匹配:错误波长可能导致特征无法凸显(如红色光检测蓝色标记)。
总结:相机、镜头、光源的选型需紧密结合检测需求(精度、速度、缺陷类型),并通过实验验证配置合理性。实际项目中,建议先通过小样测试优化参数,再批量部署。
上一篇:表面缺陷检测的定义
